Overview
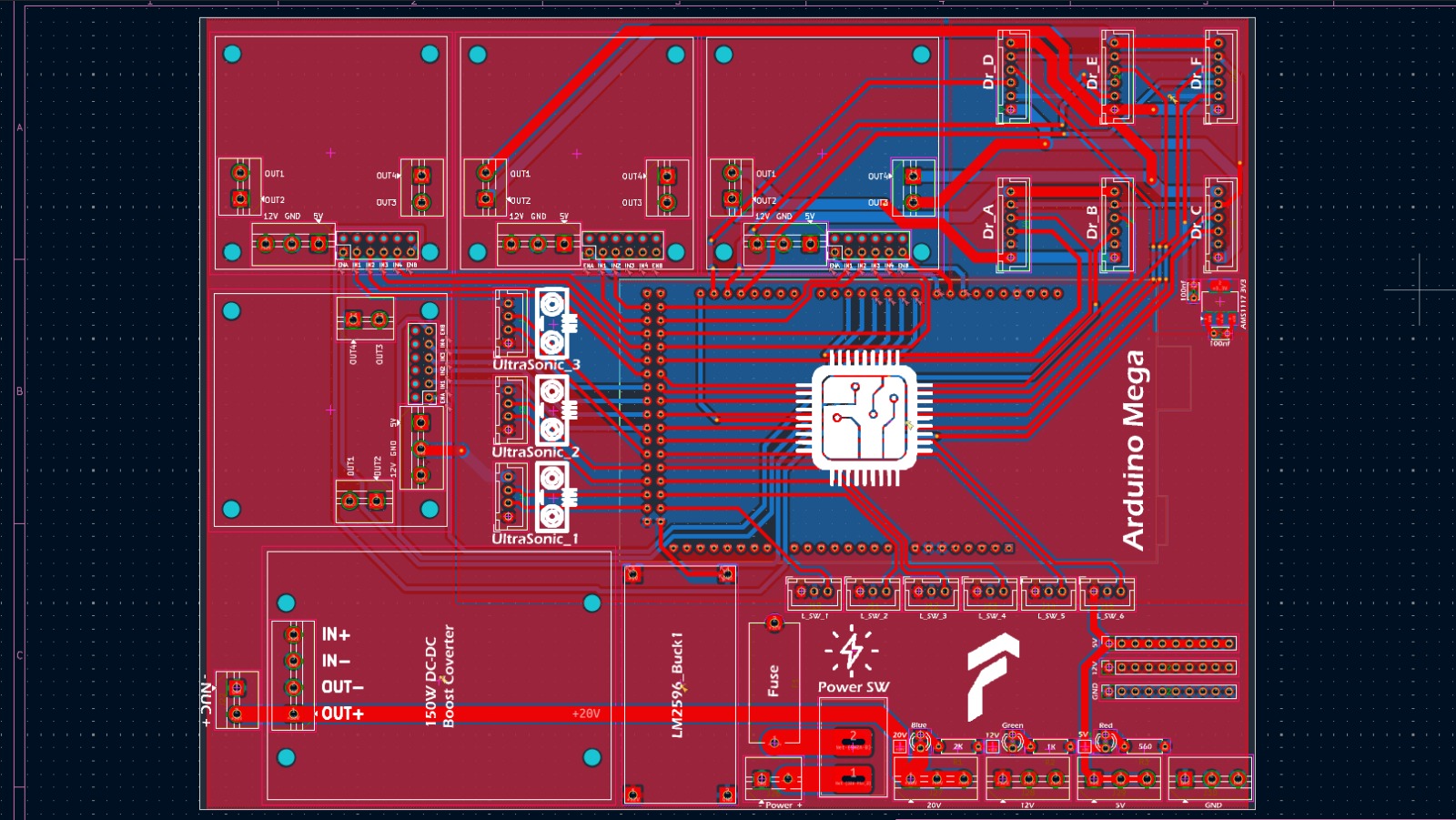
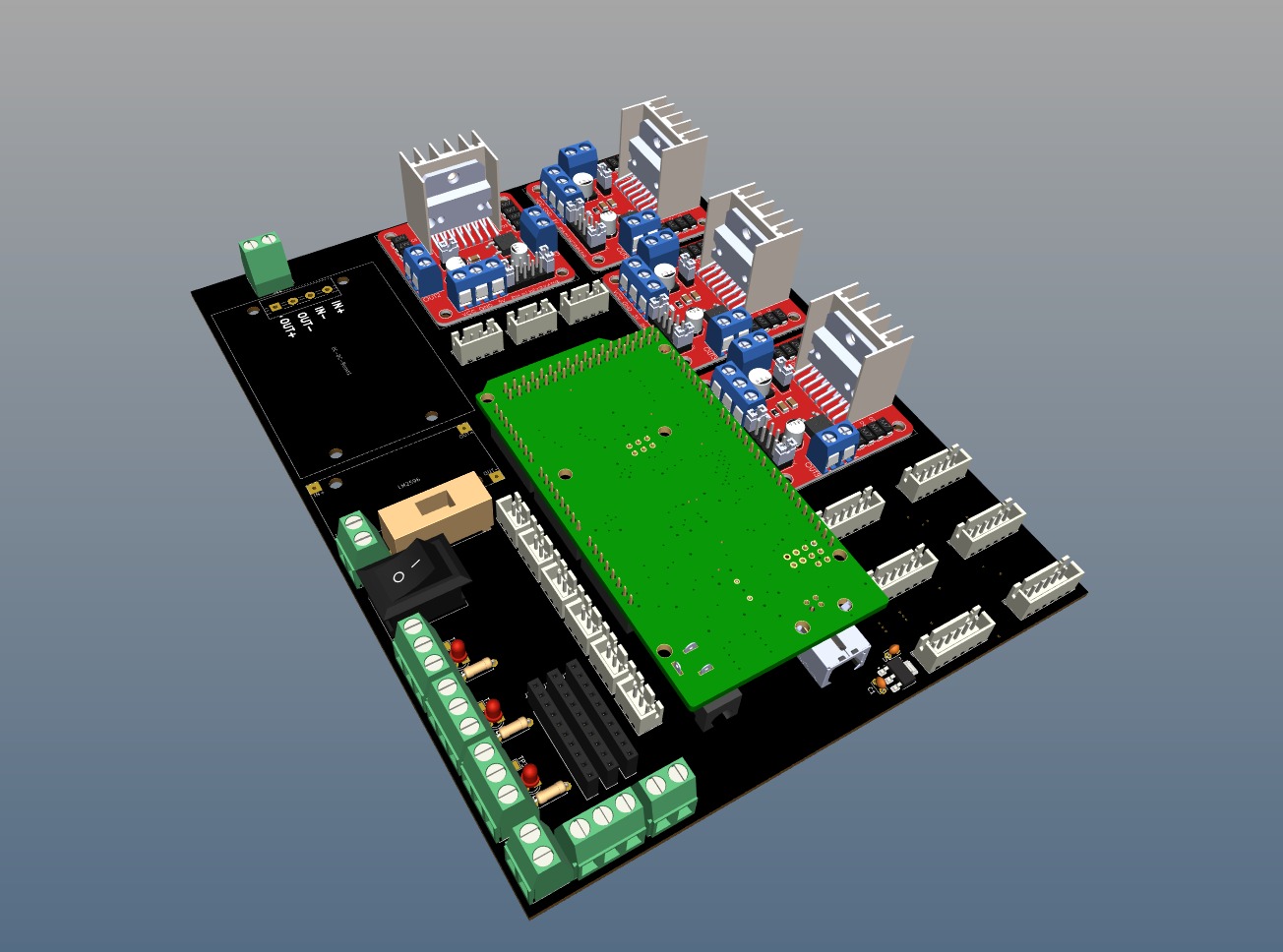
Designed a single-board integrated controller that consolidates motor drivers, encoder interfaces, multiple sensor inputs (ultrasonic, IR, IMU), and power management into one compact PCB for a ROS-based autonomous hospital service robot.
The board replaces a fragile multi-board wiring setup, significantly improving system reliability and reducing assembly time for field deployment. The unified design minimizes inter-board cabling, reduces potential failure points, and simplifies maintenance procedures.
The controller interfaces directly with the robot's ROS navigation stack, providing clean sensor data and reliable motor command execution. Custom firmware handles real-time motor control loops, sensor fusion, and fault detection at the hardware level.
Technologies
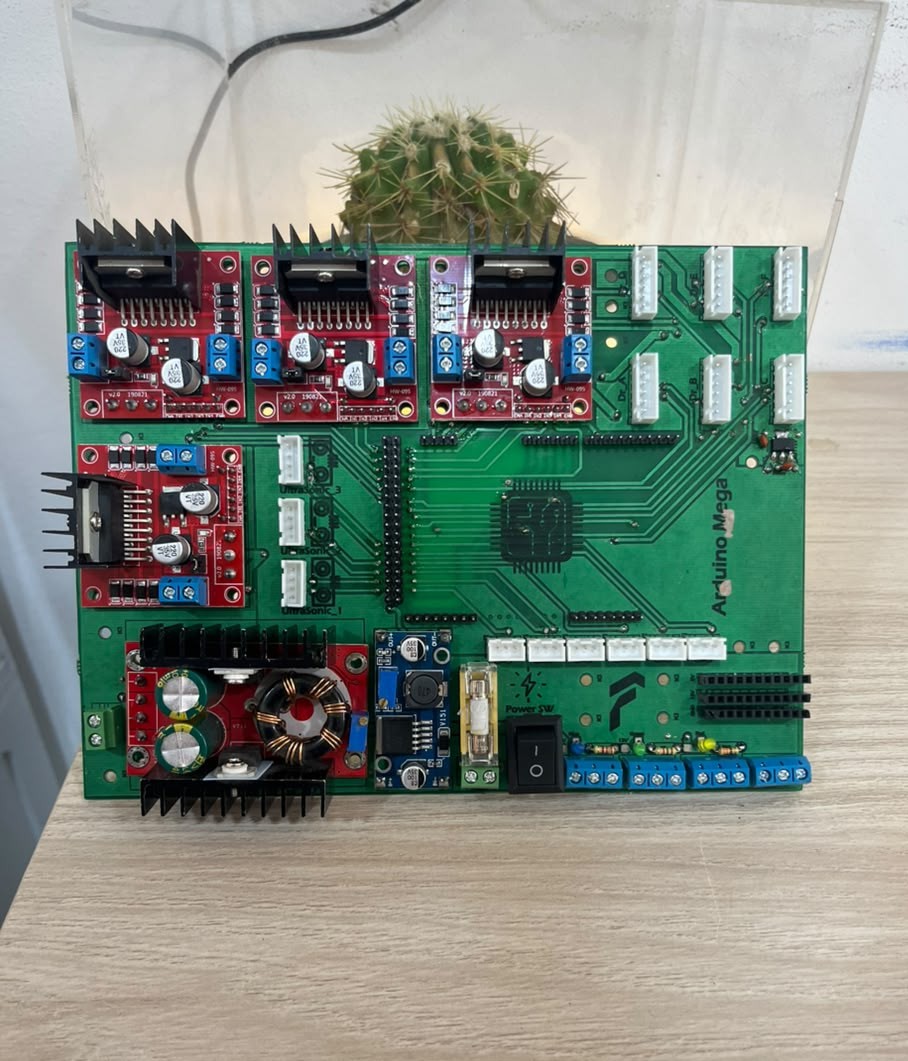
Gallery